

Raphael Zufferey
PI

At the MIT AURA lab, we study bio-inspired methods and unconventional designs to
solve seamless aerial and aquatic locomotion for applications in ocean sciences.
Since January 2025.
June 2025, Nicole Lin joined the lab as a UROP June 2025, Adowyn Bryne joined the lab as a UROP May 2025, Raphael presenting at ICRA 2025 and running the REaCT: Robotics for Environmental and Climate Assessment workshop April 2025, First lab outing! April 2025, Victor and Erik joined the lab as visiting MSc students from EPFL Mar 2025, Shun Tang joined the lab as a UROP Feb 2025, we will chair the REaCT: Robotics for Environmental and Climate Assessment workshop at ICRA 2025. Poster submissions open! Jan 2025, Adam Cohen joined the lab Jan 2025, start of the MIT AURA lab !

We develop new propulsion methods to enable both flight and underwater locomotion in robots, with a particular focus on transitions & bio-inspiration. We are currently solving challenging transition questions through experimental methods and are studying autonomy, simulation and integration aspects.

The ultimate objective of our robotic systems is to operate in our ocean and waterways without user intervention, and have a positive impact for oceanographers, biologists. To this end, we seek to understand how non-intrusive, small-scale systems can deliver high quality data in a cost-effective manner.
Highlights of future and past research projects. List of publication on ORCID and Google Scholar.

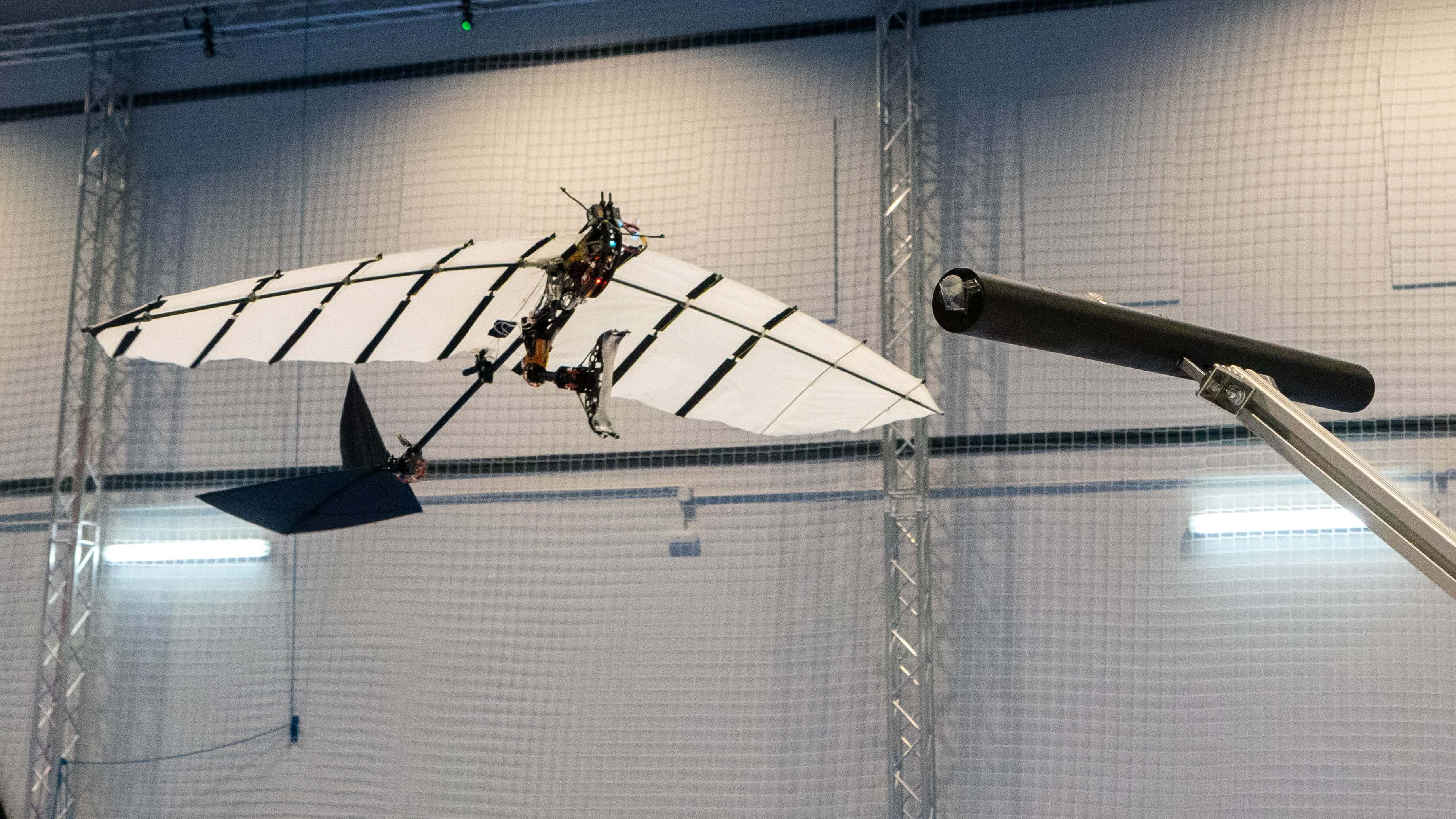
Large-scale flapping-wing robots with physical contact capabilities. Perching on a branch has been achieved!

A novel water-reactive fuel thruster for impulsive take-off, allowing multiple jump-gliding from the water surface.

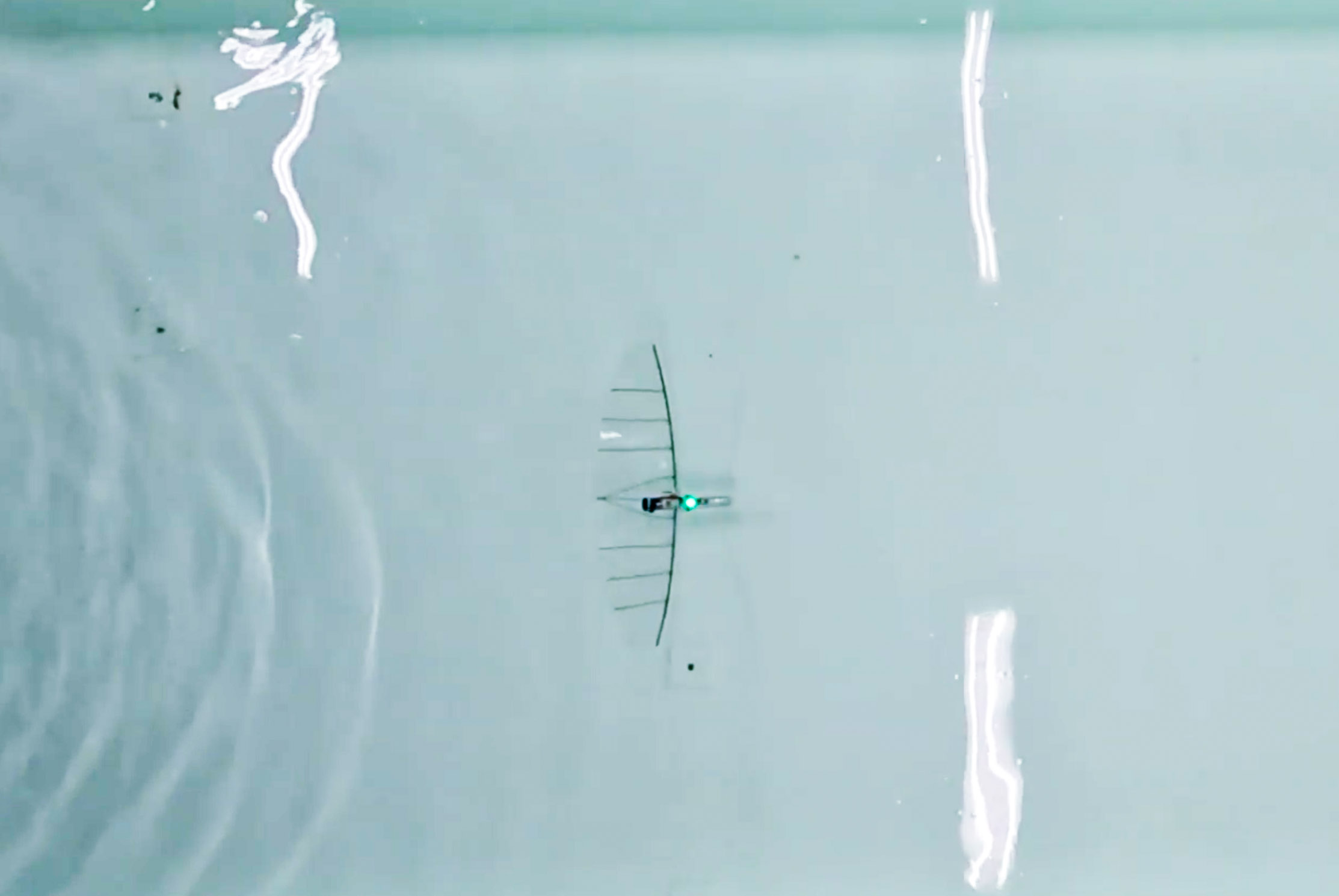
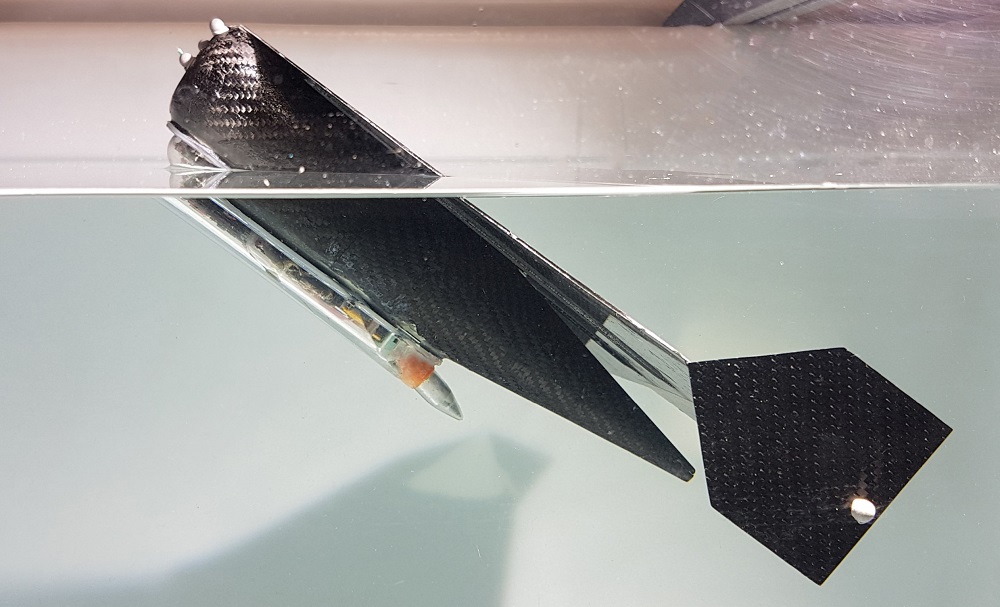
Sailing-Flying locomotion method for long-duration aerial-aquatic missions thanks to wind energy harvesting.

A Multi-Environment Dual-Robot for Underwater Sample Acquisition. The underwater pod can move, film and sample.

Aquatic escape of a 160 milligram robotic bee using flapping flight, hydrogen combustion and electrolysis.

Quadrupedal legged Harvard Ambulatory Micro Robot (HAMR) with custom electronics and wireless control.
PI

Grad student

Visiting MSc

Visiting MSc

UROP

UROP

UROP
I am looking for motivated students that are excited to study and develop the next generation of hybrid autonomous systems. To join the lab, you should apply to the Mechanical Engineering graduate admissions (deadline each year in December), and mention my name in the application. Please also send me an email with your CV, and a summary of previous projects or research. I am interested to know why you would like to join this group and what research aspects you feel most excited about. Use [AURA Prospective student] Your name in the title. Note: AI-generated emails paraphrasing the lab's ideas will not be get significant attention.