SailMAV
What the project is about
Fixed-wing robots are high-efficiency devices through their use of aerodynamic lift. This permits long-distance mission, significantly widening the application spectrum. The sailing-flying robot stems from the requirement for a robot to both possess the flexibility and range of flight yet be capable of performing long-duration missions in contact with the water for monitoring. The core aerodynamic concept of this original project lays in using the same high-performance wings for flight and for sailing. This provides long distance flight and power-neutral surface locomotion. This concept was developed extensively through models and prototyping. It led to contributions in hybrid control, conceptual robotics design, manufacturing processes and unified electronics framework. The research was published in the Robotics and Automation Letters 2019 and presented at the International Conference on Robotics and autonomous systems.
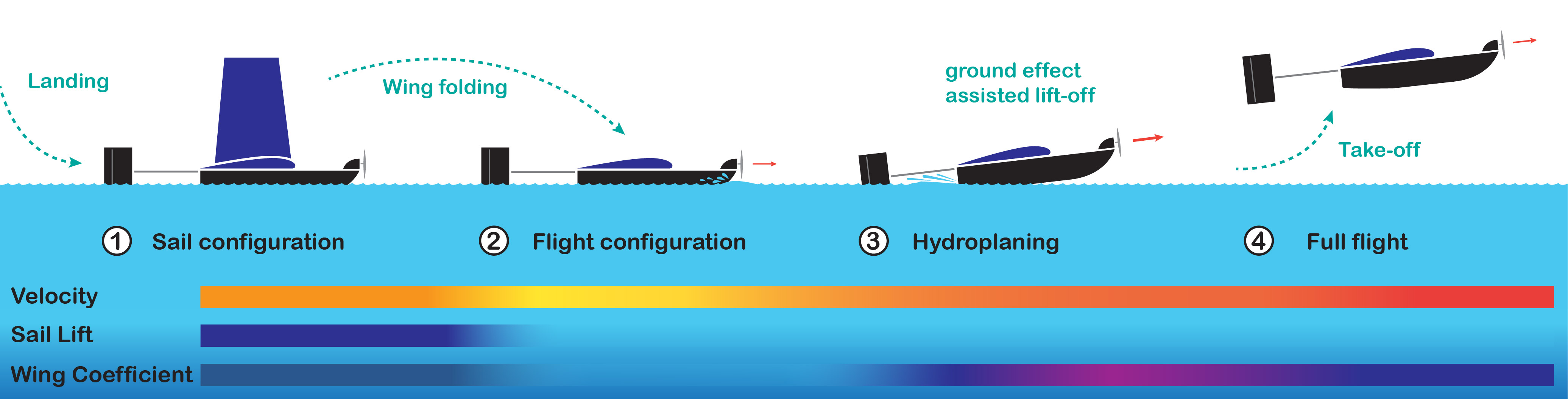
Sailing-flight cycle overview. The robot lands on water where it transitions to a sailing configuration and executes its mission. Take-off is achieved via propelled acceleration, transitioning from displacement vessel regime, to hydroplaning and lastly to being fully airborne.
Highlights video
Robotics and Automation Letters
IROS 2019
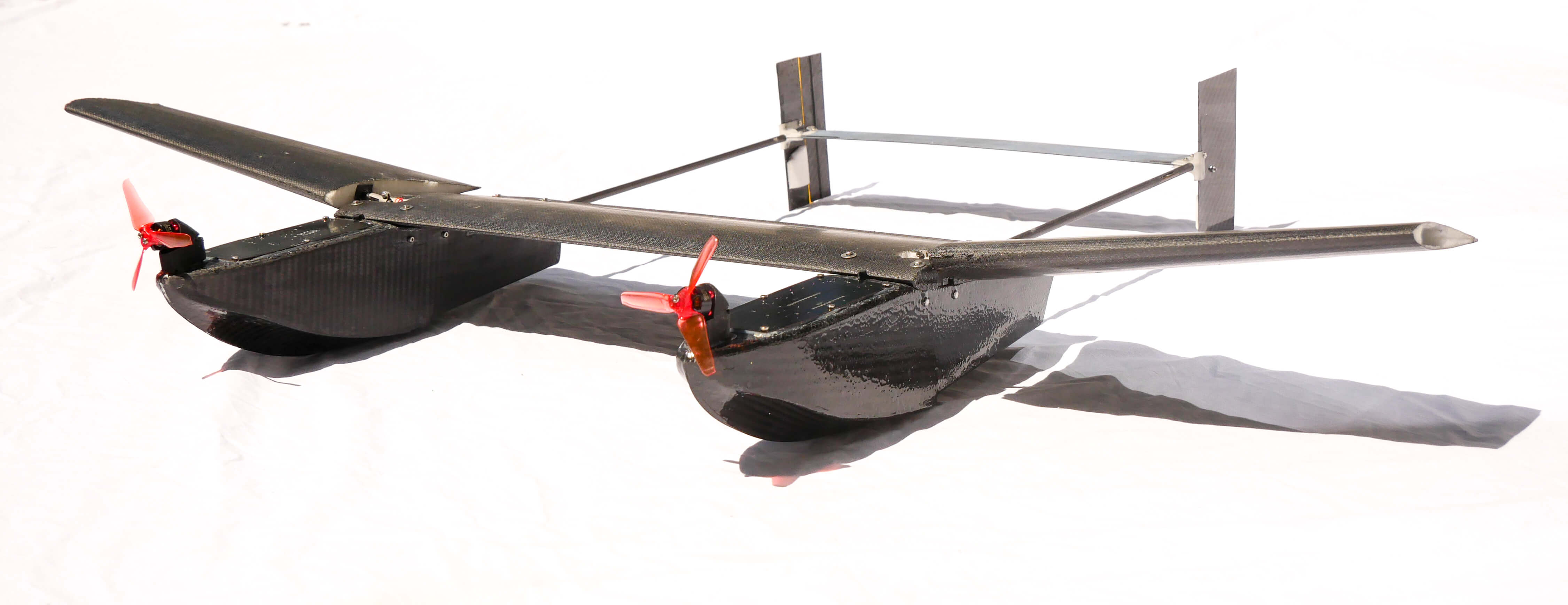
Despite significant research progress on small scale aerial-aquatic robots, most existing prototypes are still constrained by short operation times and limited performance in different fluids. The main challenge is to design a vehicle that satisfies the partially conflicting design requirements for aerial and aquatic operation. In this paper we present a new class of aerial-aquatic robot, the Sailing Micro Air Vehicle, ‘SailMAV’. Thanks to a three-part folding wing design, the SailMAV is capable of both flying and sailing.The robot design permits long and targeted missions at the water interface by leveraging the wind as movement vector. It simultaneously offers the flexibility of flight for rapidly reaching a designated area, overcoming obstacles and moving from one body of water to another, which can be very useful for water sampling in areas with many obstacles. With a total wingspan of 0.96 m, the SailMAV employs the same wing and actuation surfaces for sailing as for flying. It is capable of water surface locomotion as well as take-off and flight at a cruising speed of 10.8 ms−1. The main contributions of this paper are (i) new solutions to the challenges of combined aerial and aquatic locomotion, (ii) the design of a novel hybrid concept, (iii) the development of the required control laws, and (iv) the demonstration of the vehicle successfully sailing and taking off from the water.The presented work can inform the design of hybrid vehicles that adapt their morphology to move effectively.
PublicationSelected Media
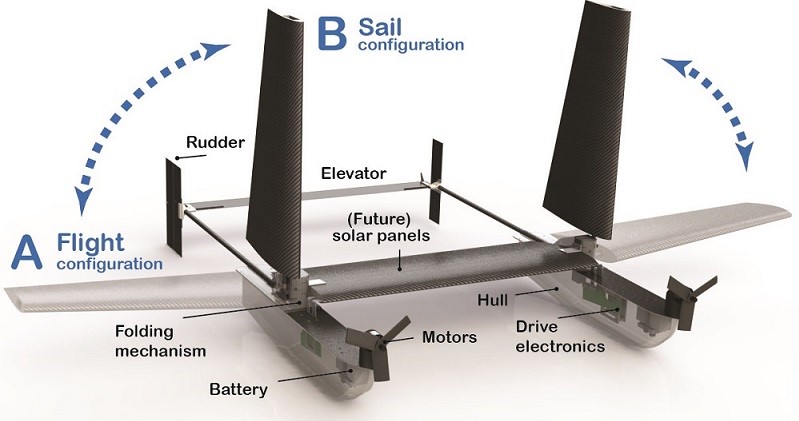
A. The sail in flying configuration, showing a 6 degree angle to the horizontal. B. The sail is moved to an upright position, for the sailing configuration.