Flapping-wing robots for physical interaction
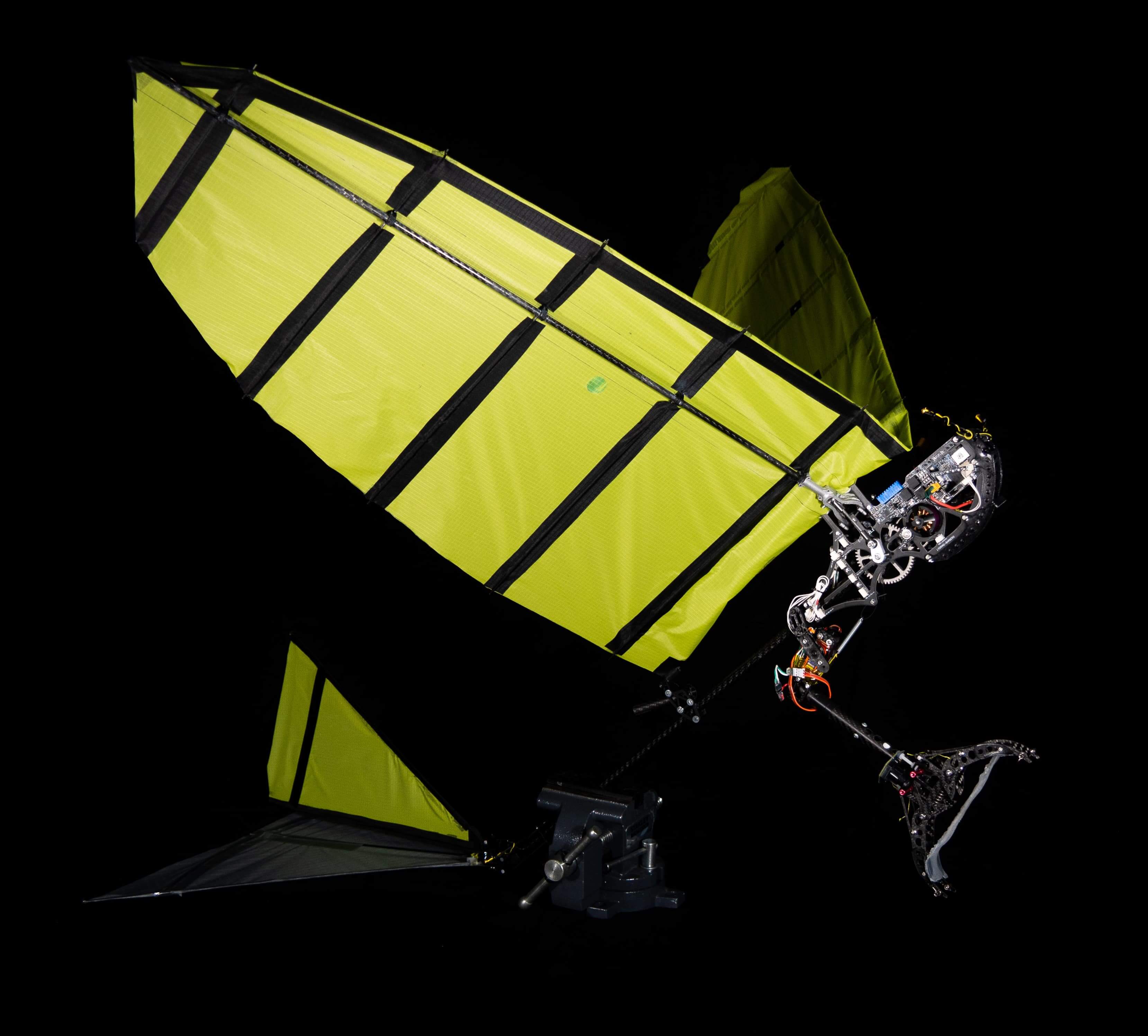
How can flapping-wing robots perch on a branch
Nature Communications, 2022
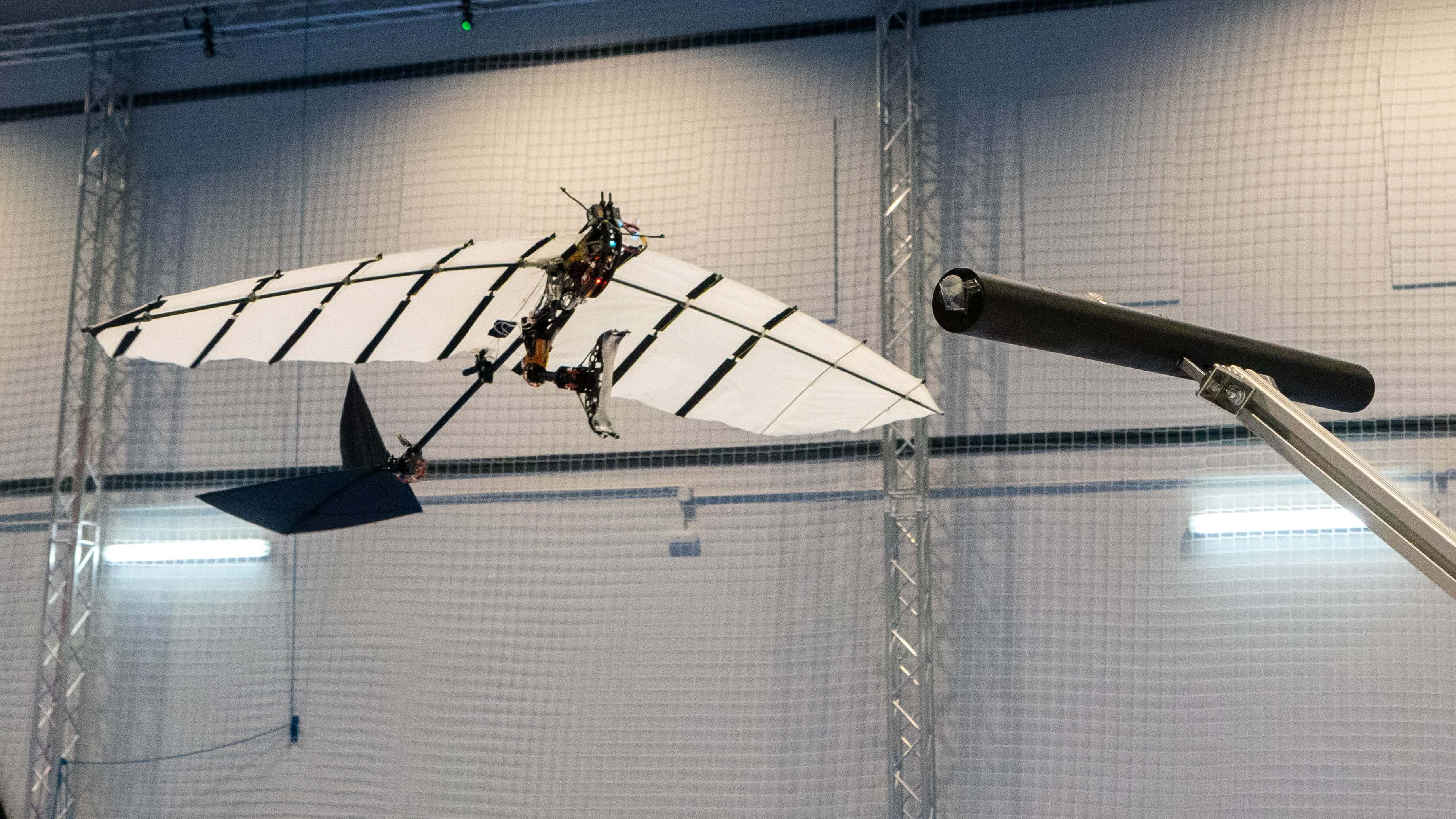
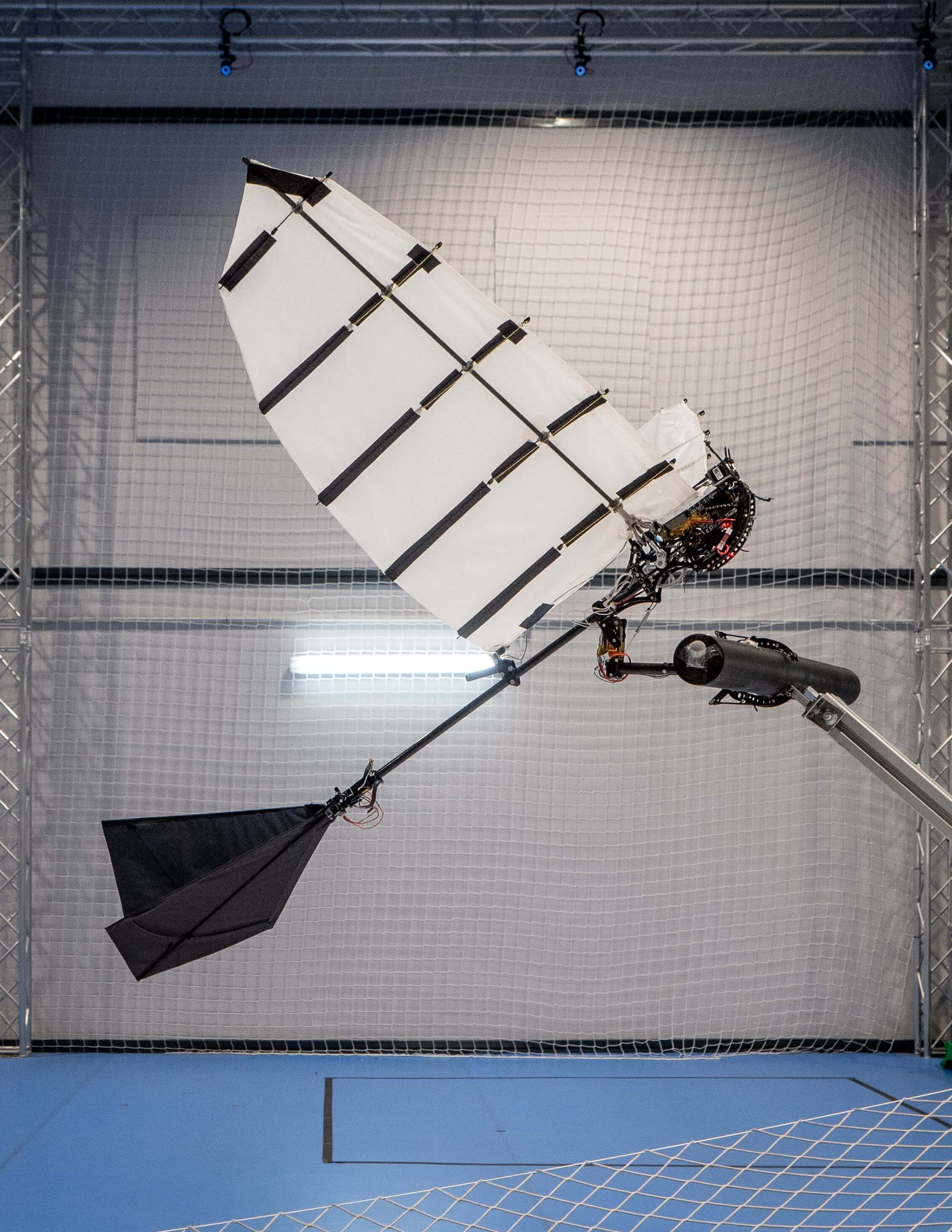
Perching and landing of aerial robots has become a topic of strong interest very recently, with major breakthroughs in multirotor unmanned aerial vehicles (UAV) with more highlight on bio-inspiration, clamping devices, and fixed-wing UAVs. The perching topic is also intensely studied on birds by biologists [5]. Bio-inspired flapping-wing robots, however, have not been shown to able to land on a branch. Yet the potential of such combined technology is wide, ranging from efficient flight, energy-recovery, environmental monitoring around birds to highly agile, low-noise and most-importantly safe flight. The challenges to achieve a full, autonomous perching with an ornithopter are numerous and all stages need to operate jointly in flight. Speed reduction and position control is a prior requirement to complete the perching/grasping task, which is difficult for flapping-wing systems. Flapping robot position control has not shown any significant accomplishment so far, and literature presents open-loop flight envelop, or manual-controlled outdoor results. As the robots reaches the vicinity of the branch, oscillations in the flight path need to be compensated. Lastly, successful branch perching can only occur with the adequate grasping appendage. This system needs to satisfy stringent required in terms of weight, due to the limited payload, passive grasping, closing times, impact resistance, high forces, and re-opening capability. This research presents a method for perching flapping-wing robots, including design work, flight control and experimental development process. We then demonstrate autonomous and repeatable perching flights in an indoor setting, based on a 150cm wingspan flapping robot. To the best of our knowledge, this is the first demonstration of a flapping-wing robot perching on a branch.
PublicationHighlights video
Selected Media

Press Coverage
New Scientist
Popular Science
Newsbreak
RTS
RTS Info
Science et Vie
Flapping-wing robot design
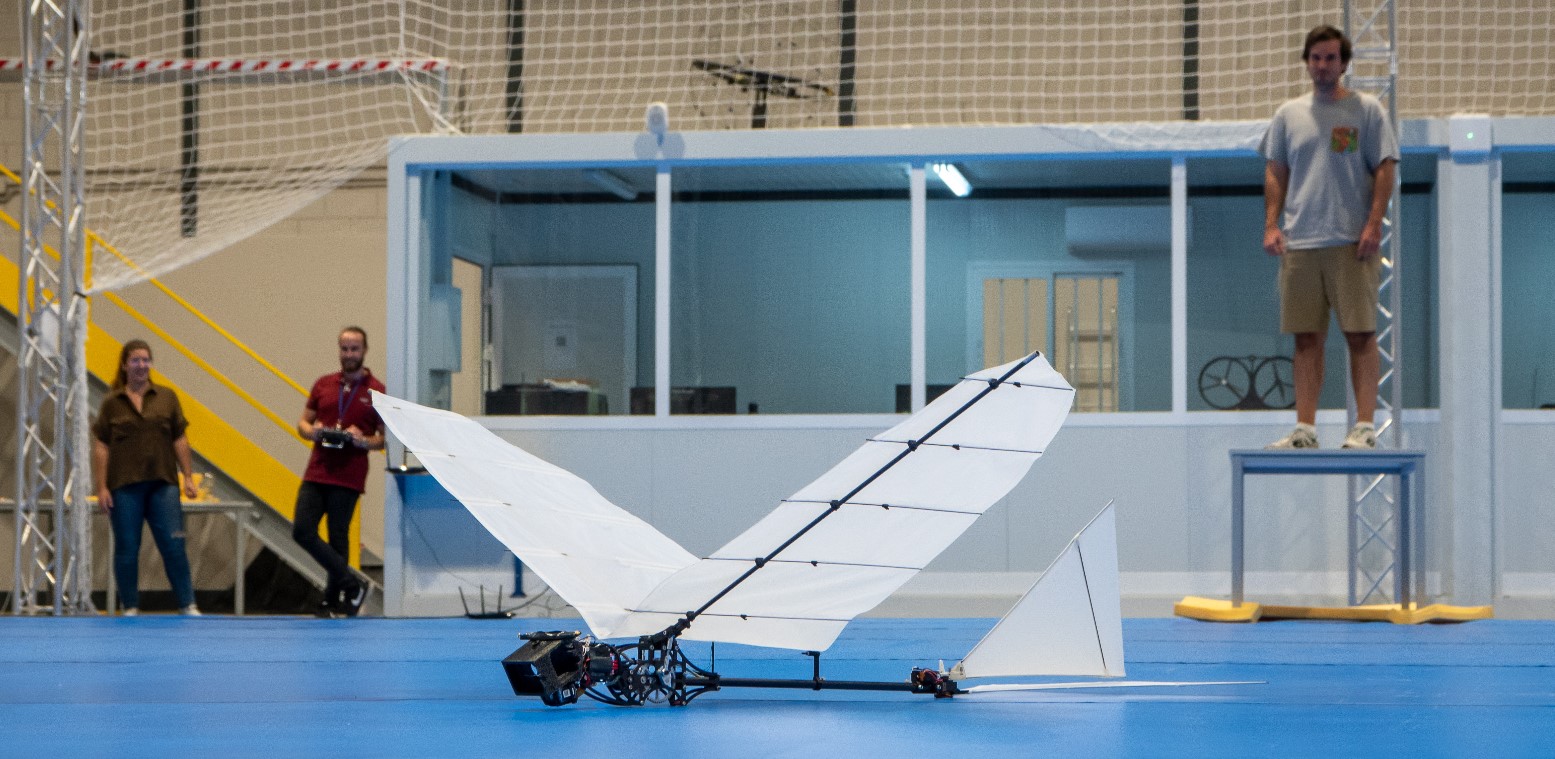
Autonomous lightweight flapping-wing robots show potential to become a safe and affordable solution for rapidly deploying robots around humans and in complex environments. The absence of propellers makes such vehicles more resistant to physical contact, permitting flight in cluttered environments, and collaborating with humans. Importantly, the provision of thousands of species of birds that have already mastered the challenging task of flapping flight is a rich source of solutions. However, small wing flapping technology is still in its beginnings, with limited levels of autonomy and physical interaction capability with the environment. One significant limitation to this is the low payload available. Here we show the Eagleinspired Flapping-wing robot E-Flap, a 510g novel design capable of a 100% of payload, exceeding the requirement of the computing and sensing package needed to fly with a high degree of autonomy. The concept is extensively characterized, both in a tracked indoor space and in outdoor conditions. We demonstrate flight path angle of up to 50deg and velocities from as low as 2 m/s to over 6m/s. Overall, the robotic platform has been proven to be reliable, having performed over 100 flights. Through mechanical and electronics advances, the EFlap is a robust vehicle prototype and paves the way towards flapping wing robots becoming a practical fully autonomous flying solution.

Composite image of the E-Flap along a flapping cycle during outdoor flight.
Robotics and Automation Letters / ICRA 2021
Publication
Comparison of tail designs for flapping-wing robots
This publication focused on the analysis of tail designs for flapping-wing robots.
PublicationSelected Media