Harvard Ambulatory Micro Robot
 Overview
Overview
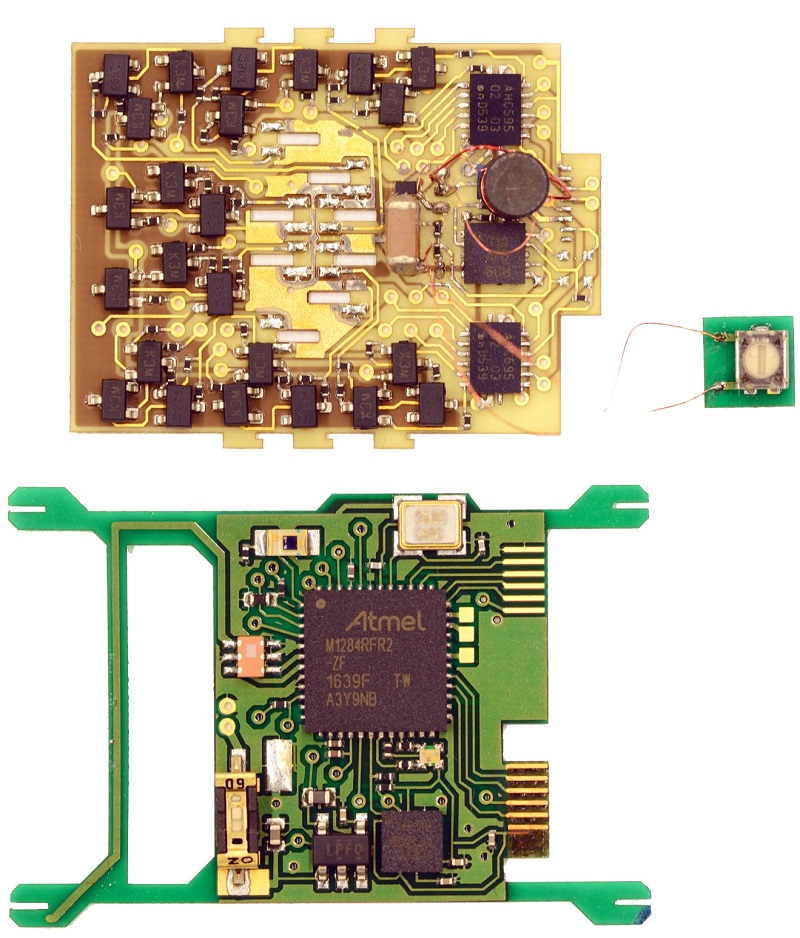
In this work, I developped a new design that leverages advances in manufacturing, sensing, and energy storage to seamlessly integrate with the electrical and mechanical components on HAMR. Combined with an upgraded powertrain, this results in a more mechanically and electrically robust platform that allows for significantly faster locomotion, variable gait control, improved heading control and payload capacity, and the ability to achieve dynamic gaits with aerial phases (e.g., pronking and jumping). HAMR has a 2-DOF spherical five-bar transmission that was designed and extensively charac terized in previous work. Each transmission is driven with two independently controlled, optimal energy density piezoelectric bimorph bending actuators. One challenge for driving these actuators in an autonomous version of the robot is generating onboard, high-voltage drive signals. Given the current piezoelectric bimorph actuator designs, HAMR requires a minimum power of 100mW (actuators only) to achieve its fastest speeds at 150V. Furthermore, in order to maintain independent control of each DOF, eight high-voltage drive signals are required, one for each actuator.
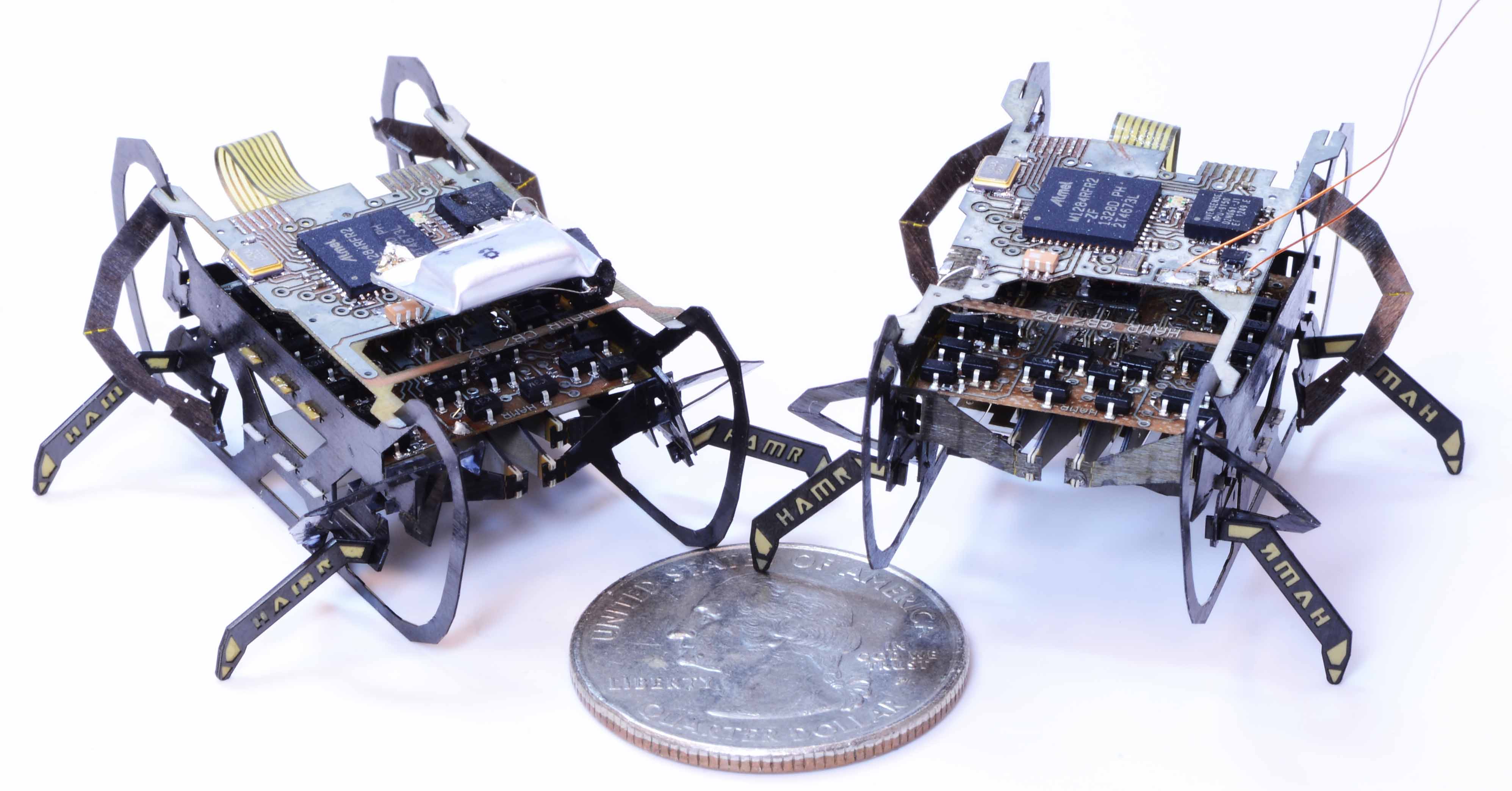
Quadrupedal HAMR-F with custom power and control electronics powered by an 8mAh lithium polymer battery.
Power and Control Autonomy for High Speed Locomotion With an Insect-Scale Legged Robot
Robotics and Automation Letters 2019
ICRA 2019
We present a power and control autonomous, insect-scale legged robot, the Harvard Ambulatory MicroRobot with RF communication (HAMR-F). At only 2.8g and 4.5cm in length, HAMR-F is capable of locomotion at speeds up to 17.2cm/s (3.8 body lengths per second) with an onboard battery. Two microcontrollers and custom drive electronics independently control eight high-voltage piezoelectric actuators to enable gait flexibility and maneuverability across a range of stride frequencies. An onboard MEMS IMU provides feedback for controlled, straight-line running on this size- and weightconstrained mobile microrobot. The main contributions of this paper are: 1) the design of lightweight power electronics for independently driving multiple high-voltage (200V) piezoelectric actuators, 2) a detailed characterization of HAMR-F’s speed, maneuverability, and cost of transport, and 3) the integration of an onboard feedback controller for straight-line, high speed running.
Publication