MEDUSA
 Overview
Overview
The MEDUSA dual-robot system stems from a gap in our ability to quickly send out robots to aquatic environments. Indeed, while other novel geometries may provide increase range and longer missions, they are often too complex at this stage to be readily deployed. On the other hand, MEDUSA relies on a standard drone structure for aerial flight. This dramatically speeds up development, allowing us to showcase a fully working Drone system that is capable of underwater exploration. This research has been possible thanks to the relentless work of Diego Debruyn, a brilliant EPFL student who poured his heart into the project. It is my great pleasure to announce its selection for the IROS 2020 conference and for publication in the Robotics and Automation Letters.
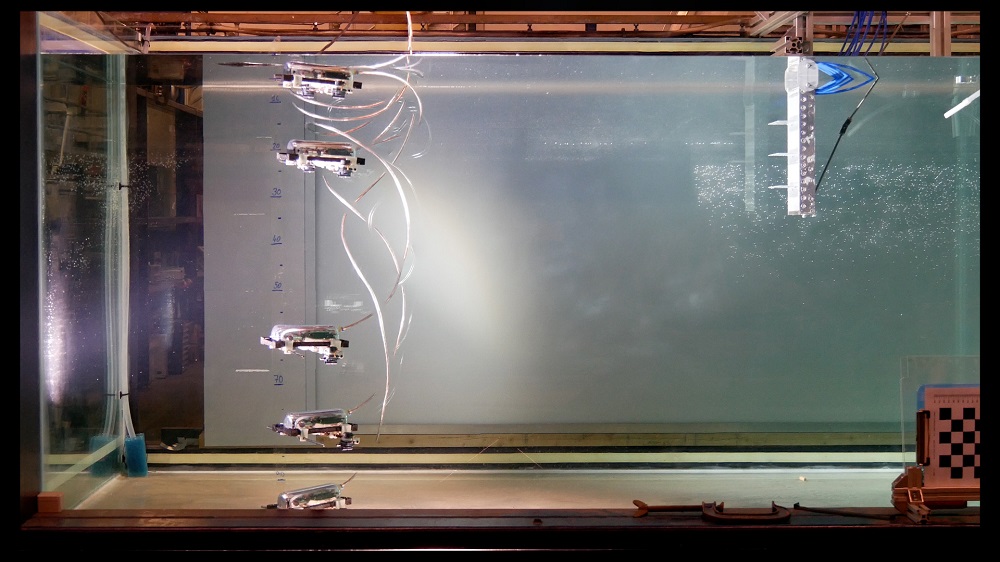
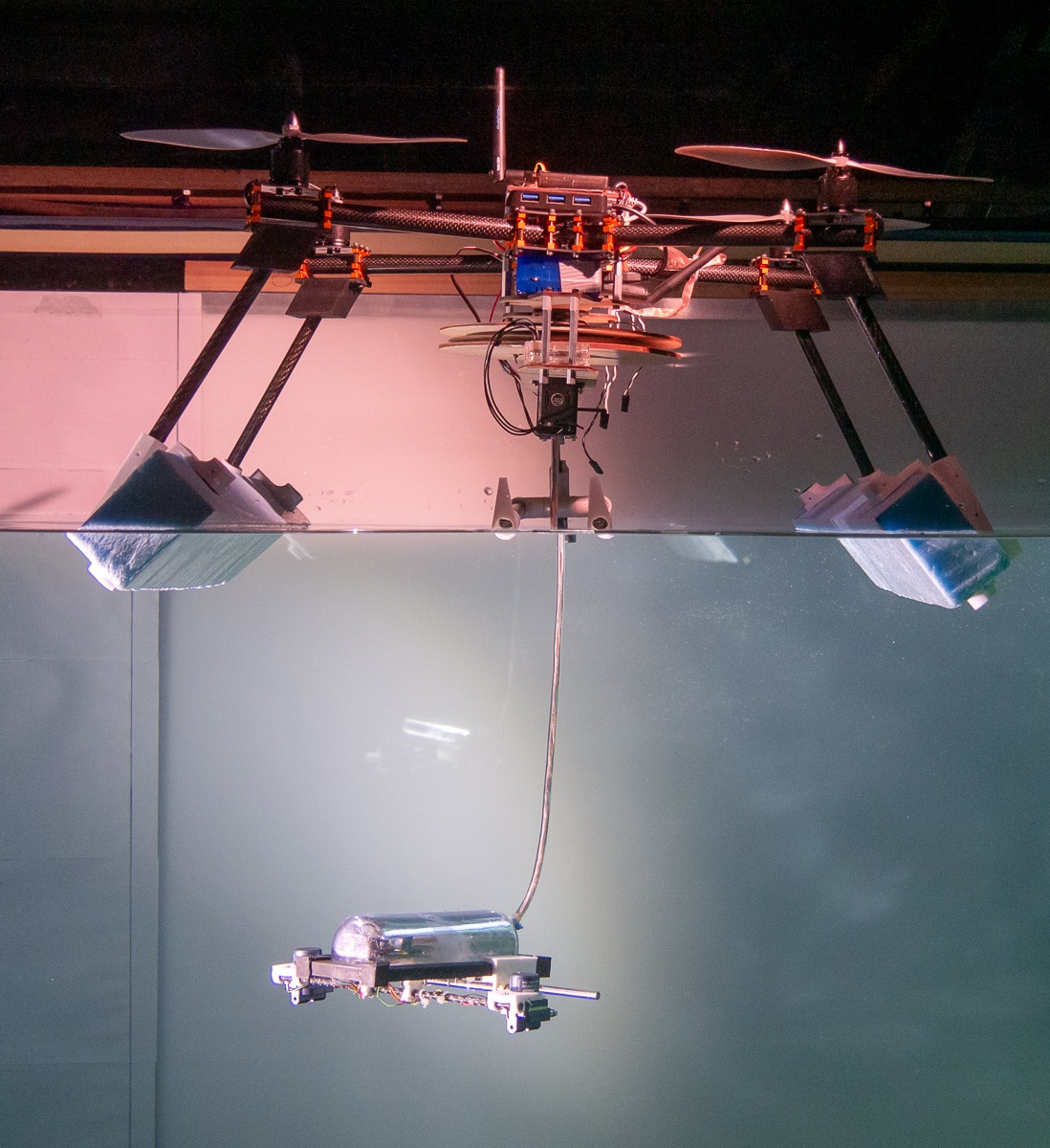
Lateral and vertical locomtion of the underwater pod through the use of a soft bladder.
MEDUSA: A Multi-Environment Dual-Robot for Underwater Sample Acquisition
Robotics and Automation Letters 2020
Aerial-aquatic robots possess the unique ability of operating in both air and water. However, this capability comes with tremendous challenges, such as communication incompatibility, increased airborne mass, potentially inefficient operation in each of the environments and manufacturing difficulties. Such robots, therefore, typically have small payloads and a limited operational envelope, often making their field usage impractical. We propose a novel robotic water sampling approach that combines the robust technologies of multirotors and underwater micro-vehicles into a single integrated tool usable for field operations. The proposed solution encompasses a multirotor capable of landing and floating on the water, and a tethered mobile underwater pod that can be deployed to depths of several meters. The pod is controlled remotely in three dimensions and transmits video feed and sensor data via the floating multirotor back to the user. The `dual-robot' approach considerably simplifies robotic underwater monitoring, while also taking advantage of the fact that multirotors can travel long distances, fly over obstacles, carry payloads and manoeuvre through difficult terrain, while submersible robots are ideal for underwater sampling or manipulation. The presented system can perform challenging tasks which would otherwise require boats or submarines. The ability to collect aquatic images, samples and metrics will be invaluable for ecology and aquatic research, supporting our understanding of local climate in difficult-to-access environments.
Publication PDF